高速ロボティクス
Japanese/English
"高速性"をキーワードとして,以下の3つのカテゴリーから構成される高速ロボティクスを研究しています. 高速化に必要なアーキテクチャから,高速化に付随して生じる課題解決技術まで,理論・アルゴリズム・デバイス・システム・アプリケーションといった総合的な観点で開発をおこなっています.
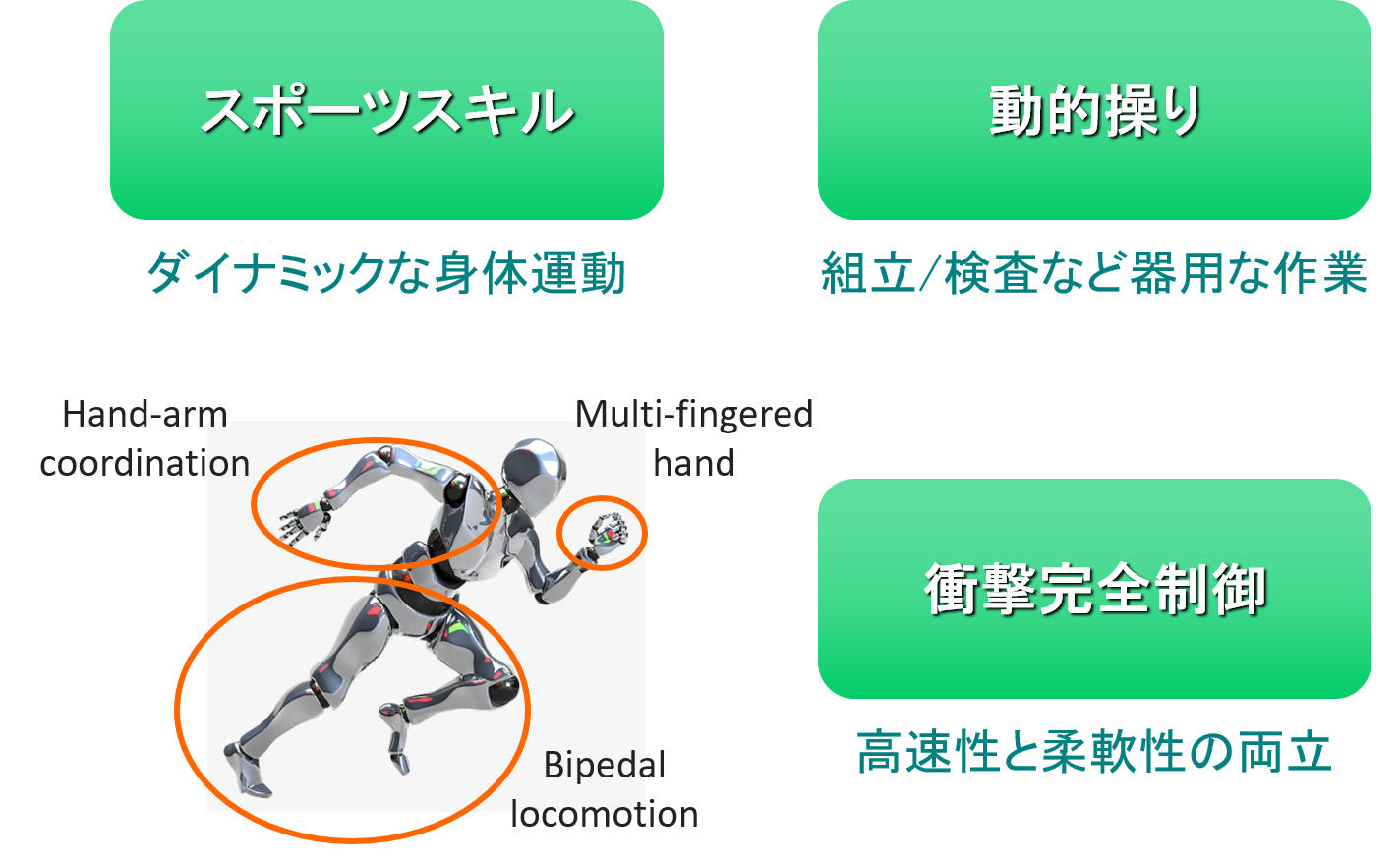
| I. | スポーツスキル:従来のロボットが不得意としていたダイナミックな運動を実現する研究.特に,スポーツ時に観測されるような投打走捕に関する技能の創出を目指します. | ||
| II. | 動的操り:多指ハンドを利用して特定作業の自動化・高速化を実現する研究.特に,組立から検査までを対象とした多種多様なタスク/工程の遂行を目指します. | ||
| III. | 衝撃完全制御:高速接触時に生じる撃力を抑制して,高速性と柔軟性を両立する研究.特に,高バックドライバビリティに着目した新たな衝撃緩和技術の確立を目指します. | ||
スポーツスキル



- 視覚情報による姿勢安定化を利用した高速二足走行
- 身体運動の位相同期に基づく投球方向制御
- ハンドアームの動作帯域特性に基づくボールキャッチング
- ハイブリッド軌道生成によるバッティング動作
動的操り

- 摩擦差を利用したペーパーハンドリング
- 振り上げ動作を利用したインハンドマニピュレーション
- 環境拘束を利用した片手ルービックキューブ操作
- 接触探索に基づく高速ネジ回し
- ピンセットを用いた微小物体把持
- 微小振動を用いた受動的コネクタ嵌合
衝撃完全制御

- 高バックドライブ特性を有するグリッパを用いたグラスピング
- 磁石歯車を用いたスライダ機構による衝撃吸収制御
- 塑性変形モデルを用いたインピーダンス制御設計
- Maxwellモデルに基づくビジュアルショックアブソーバ
[ホーム]