High-speed Robotics
Japanese/English
We conduct research on High-speed robotics which consists of the following three categories. We develop from the architecture required for speeding up to the problem-solving technology arising out of speeding up, from a comprehensive perspective of theory, algorithms, devices, systems, and applications.
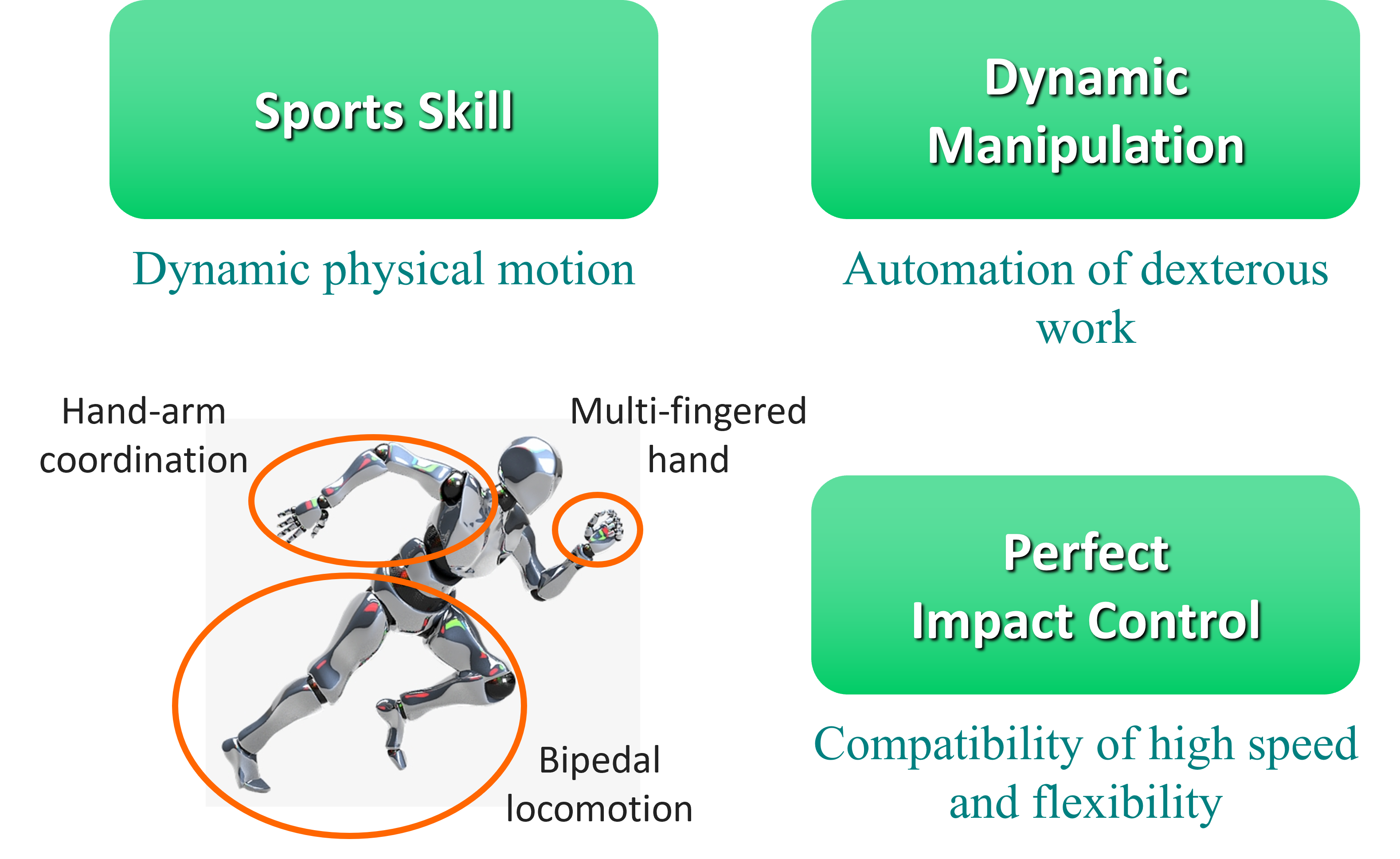
| I. | Sports skill: Research to realize dynamic movement that is difficult for conventional robots. In particular, we aim to create skills related to running, hitting and fielding such as that seen in sports. | ||
| II. | Dynamic manipulation: Research to realize automation and speeding up of specific work using multi-fingered hands. In particular, we aim to perform a wide variety of tasks and processes from assembly to inspection. | ||
| III. | Perfect impact control: Research to achieve both high speed and flexibility by suppressing impact force. In particular, we aim to establish new impact absorption technology focusing on high backdrivability. | ||
Sports skill



- Bipedal running based on visual stabilization of posture
- Pitching based on phase synchronization of physical motion
- Ball catching using hand-arm manipulator
- Batting based on hybrid trajectory generation
Dynamic manipulation

- Paper handling using friction difference
- In-hand manipulation using swing-up motion
- Rubik's cube operation based on environmental constraint exploitation
- High-speed screwing nut based on contact search
- Tweezers manipulation for microobject grasping
- Passive connector fitting using micro vibration
Perfect impact control

- Grasping using gripper with high backdrivability
- Impact absorption using slider mechanism with magnetic gear
- Impedance control design using plastic deformation model
- Visual shock absorber based on Maxwell model
[Home]